ˮƽ������������������P���OӋ�c����
���ٙ�Ŀ���CеՓ�� �l�����ڣ�2019-05-28 09:45 ��ȣ�
����ժҪ�������ˮƽ�������������p늙C���Ʒ�ʽ��ᘌ�ԓ��ʽ�����ܺ��^�ߡ��l������Ϳ��Ə��s�Ȇ��}���OӋ��һ����������P�Ա��C�L݆�c�ܱ�֮�g�a���������������Ķ��H�Ɇ�늙C���������������������Ԫ������ԓ��������P�M����늴ŌW����Ӌ�㣬����ӑՓ�˶����ߴ煢�������˴����ܵ�Ӱ푣���K�xȡ��һ�M�^������ijߴ煢����ԇ���������yֵ�c����ֵ֮�g���`��С��15%���������܉�a��3000N���ϵĠ�������
�����P�I�~��ˮƽ��;������;�����;������
����1 �����
����1.1ˮƽ��������
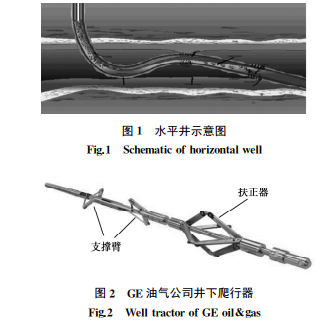
����ˮƽ���c�͌ӽ��|��e�^���^�͌ӵľ����L���^�L[1]���ܴ������ʯ�ͮa�������@Ҳ���������~����b�����ݔ�̓x�����O�䡣Ŀǰ���õ�ˮƽ�����������Կ��١��ʴ_����ɴ���΄գ����@���s�r�g�ͽ��ͳɱ���ˮƽ��(ʾ��DҊ�D1)��������Ҫ�ɷ֞�݆ʽ����sʽ�ɴ�������� GE�͚˾��˹��ؐ�x��˾���Ƶ������������졣�D2��ʾ�鱻GE��ُ��ԭSondex��˾���a��݆ʽ������[2]�����У����������o��֧�����ã�ʹ������λ�������ġ��Ɍ��������ֱ��֧�α����������Ĉ��ЙC�����ڝ���늙C�����£�4���L݆ͬ�r�D�ӡ��c��ȼ�C܇���������K�C���෴����һ�����^С��늙C�ӻ��K�Ɍ��F֧�α۵Ĕ[��(�����_���Քn)����˿��{���L݆�c�ܱ�֮�g����������С���^��������늙C���D���^С�������L݆��
����ˮƽ�����������OӋ��Ҫ�����ڿ��g�ִ٣�����Ǿ������I�h���ĸߜظ߉��������OӋĿ��������ϵ�y���Ρ��ɿ�������ϵ�y���OӋĿ��Ҳ��Ԫ���������M���١�����߉�����������߾��������@Щ���]������ʹ��늴��F���ӻ��K�Ƅ��M������֧�α۵��_�ϣ��t�ɴ���������Cе�Y���Ϳ���ϵ�y���OӋ������늴��F����Ҳ����һ���IJ��㣺�l�����@���ܺĴ��Ҵ�����F�o����λ�r�п��܌���늴��F�������[������������P�^�����ؽ�Q���@Щ���}���H��Ҫ�����еľ�Ȧͨ�ʹ���P��ţ�֮�ɔ�늣����P���ܱ����^��������;���I�Y�����M���˴ţ����P�����������K��֧�α��ڏ��ɵ������¼����Քn������ˮƽ������������������Pֱ��Ҫ������ 55 mm �� �ȣ������C�������܉�a��3000N���ϵĠ����������Č���������P�M���˙C���OӋ�����桢�yԇ�̓�����
����1.2 ����ż��g�đ���
�����ԏ�1974�������̩��(Tecnomagnets)��˾�l������������P֮����������PѸ�ّ����ڸ߶˙C��������b�A[3]��������F�����O��[4]��ע�ܙC���ٓQģϵ�y[5-7]���I���С���������P�ă��cҲ�������C�����о��ߵ�Ŀ�⡣2002�꣬�������[8]��������ŵ�ԭ�팍�F�� �C �� �� �� �� �� �� �� �� Ч �� ��;2010 �꣬KNAIAN[9]������ő����ڿɾ����O����B�������Ƅ���;WARD ��[10]2012������˿Ɍ�����ő��������ڙC���ˡ�����չ�C���˵��I���˼ · �� �O ��;2015 �꣬OCHOA-CARDENAS��[11]��������ż��g�OӋ�����ڙC���˵�܇݆ģ�ͣ���ͨ�^����Փģ���M������C[12]��
����2 ˮƽ�����������Wģ��
����ˮƽ��������֧�α��_�ϽY��ԭ��Ҋ�D3��늙C�Ƅ��ƗUǰ�M�������������K�C�����F֧�α۵ď��_�������ܱ�ʩ��������������֮����������P������F�����c�ܱ��g��������;늙C�c�ƗU�g�����x��Ó�_���H������݆�D�ӣ��Ķ����F�������ھ��µ����С�
�����������������^���У����˱�����������P�c��FÓ�_���ƗUĩ�˲���ֱ���c��F���B�������������X݆�X�l���ӵ����Ŵ�C��������ͬ�S�X݆�D����ͬ�����X����ͬ(ģ����ͬ)���ƗU������СF2 �c��������P������ֵF1 �������Pϵ��F1F2=z1z2(1)ʽ�У�z1 ��С�X݆�X�������Hֵ��8;z2 ����X݆�X�������Hֵ��16������̓��ԭ������Ӌ���������СF2 �c������Fn �͠�����Ff���Pϵ��F2=FnL1cosα1-Ff(L1sinα1+r)(L1+d)(sinα1+cosα1tanα2) (2)���У�L1 ��֧�α۵��L��|OA|���� �H ֵ ��75mm;α1 ��֧�αۏ��_�Ƕȣ��� ȫ �� �_ �r ��37.4°;α2 ���B�U�c���S�A�ǣ���ȫ���_�r��37°;�B�U�q���c����݆�S�ĵľ��xd=25mm;��݆�돽r=32.5mm���@���݆�c�ܱڵ�Ħ�����|�^�̺�������Ħ����Ff=μFn (3)ʽ�У�μ��Ħ������ʽ(1)��ʽ(3)����Ӌ�����������P������ֵF1 �c������Ff�Pϵ��F1Ff= z1L1cosα1-μz1(L1sinα1+r) μz2(L1+d)(sinα1+cosα1tanα2) (4)����ʽ(4)��ȡĦ����0.3���������׃�����H��ֵ����Եõ������˱��C��������������܉��_��3000N ���ϣ���������P�ij������ֵ��ԓ����1500N��
����3 ��������P�Y���OӋ
�������ڙC���������O�����������P��������нY�����ߴ��^���yֱ�����ڙC���˵ı��w�Y���С����������������ÈAͲ����⚤�������������P���OӋ��A���Π��������P���ܮa���������c��ֱ����С��ֱ���Pϵ���������eԽ����Ч������Խ�����Ŀ���OӋ���������⏽��70mm��������P���⏽���ܳ��^55mm�����P��Ҫ�ɃɷN��ͬ���|�������F����ܗ�Լ���Ȧ�M�ɣ�Ҋ�D4��
������������P�ı��|��ͨ�^��׃һ�N���Ų��ϵĘO�ԣ��Ķ�������������һ�N���Ų��Ϯa���Ĵň����ȣ����_����Ż��˴ŵ�Ч�����AͲ�ʹ�ܗ�x�õIJ����ǸߴŌ��ʵ�늹����F DT4C����Ҫ��۴ŵ����á����δ��F�x����̖�� N35EH���S�F�𣬃ȷA�C�B���^�ŘO�������װl����׃��ʹ�ÜضȲ����^200�档�A���ε��X�⒴��F�ăȷA�C�B���^С���ŘO�������װl����׃����߹����ضȿ��_400�棬���|��̖�� LNG60����Ȧλ���X���cͲ��֮�g�����ڳ��˴š����w���˴��^��Ҋ�D5�����O�S�F����F�O����D5��ʾ���˕r���X�������� N�O��������S�O(�D5a)���t�ஔ���ڼӏ��S�F��Ĵň��������P�Ϸ����F�Ų��Ϯa��������;��A���X�⒵ĘO�Է���������� S�O�������� N �O(�D5b)���A���X���c�S�F��Ĵň�ͨ�^��ܗ�͈AͲ�γ����]�ϻ�·�������P�Ϸ����F�Ų��ώ����a������������Փ����������ԓ�Y������������P���ԝM������ij��˴������Ǹ����Y����������������ܵ�Ӱ�߀��Ҫͨ�^����Ӌ����_����
����4 ��������P����Ӌ��
��������ģ�͵�Ӌ�㣬����߅��l�����s������B-H �����Ǿ��ԵȆ��}�����y�о��_����Փ��ʽ����ʹ�á����IJ��õ�������Ԫ������������˹�f���̽M�Ļ��A�ϣ����Ø�����λ���ň��M�з���������ø���λ�ôŸБ�����B �ʹň�����H ������̓��������Ӌ��ň�����ԓ������ͨ�^�����Ƅӕr�܇��՚��Ԫ��������׃�����g��������Ĵ�С��s��������������ʽ��ʾ��[13]Fs =��VB��H��sdV+��V∫(H0BdH)����sdV (5)���У�s�鹝�c������ȫ�������ϵ�̓λ��;Fs��s�����ϵ���;V ����������Ԫ�w�e������ANSYSܛ�����Է���،�ԓģ���M����⣬���w���E���¡�
����(1)���������͆�Ԫ��͡���������������P�������S�������o�B�ň��ķ������C�Ͽ��]Ӌ���ٶȺ;��Ⱥ�Q�����Ø�����λ��������Ԫ����x�������w������10���c��solid98��Ԫ��
����(2)���x���υ������S�F����F(N35EH)�C�B �� 860 kA/m��ʣ �� 1.17 T;�X � � �� �F(LNG60)�C�B��56kA/m��ʣ��1.35T��늹����F���õ��� ANSYS���ώ��е�BH ������
����(3)����ģ�ͺ̈́��־W���ՈD4��ʾ�ĽY��������������ģ���O�����ϲ����־W��
����(4)ʩ������־������Ӌ��늴����������P�Ϸ�������һ����55mm×10mm�ĈA���w���F�������������y���� �� �� �� �� ANSYS �� ��FMAGBCӋ���F���Թ����ܵ�����������
����(5)ʩ��߅��l�����x����ⷽ����ʩ�Ӵ�����ƽ��߅��l�������ڱ�ģ���в��������Դ�����Բ��õ��Dz�֘�����λ���M����⡣
����(6)Ӌ�㲢�@ʾ�Y�����������ϲ��E���O�ù�������������P֮�g�ľ� �x �� 0.1 mm���� �� ��h1 =60 mm��h2 =10mm��d1 =4 mm��d2 =5 mm��Ӌ �� �Y �� Ҋ�D6�����Կ������oՓ�dz��߀���˴ţ�x ������(Force-X)��y������(Force-Y)�Ĵ�С�����Ժ��Բ�Ӌ��Force-Z��ؓ�������������@���c���H�����������ŕr��������С��1590.9N;�˴ŕr��������С������0�����ǵ���91.96N��
�����ŸБ�����B �ķֲ�Ҋ�D7�����l�F�c�D5�ķ����Y����һ�£��@Ҳ�Mһ����C���OӋԭ���Ĝʴ_�ԡ������y�l�F���ڈAͲ�܇�����һЩ©�ŬF���@Ҳ���˴ŕr�����^��������һ����Ҫԭ�����ԣ�ϣ��ͨ�^�����Y����������߳�������������˴�������
����5 ��������P�Y����������
������������P�Y��������Ҫ�LjD4�е�4�������A���X�⒴��F�߶�h1���AͲ�ں�d1�������S�F����F�ĸ߶�h2 �ͺ��d2��������ʽ�Ǻ��Ό��ȷ�����֮ǰ���慢���Ļ��A�ϣ���������׃����׃��ᘌ�ij���ض�������Ӌ���һϵ�в�ͬ��ֵ�����ij������Fc���˴�����Fd���ُ����xȡ�^����m��ֵ������Ŀ����ϣ����������܉��^���˴�����������10N�ԃȡ�
����5.1 �A���X�⒴��F�߶�h1
���������������� �� ׃����h2 =10 mm��d1 =4mm��d2=5mm��h1 ��30mm ׃����65mm�����wӋ��Y��Ҋ�D8�����Կ������S��h1 ����������������������L����u����;�˴�������u�������w׃����������10N����h1>50mm���������׃���@���pС�����Ԍ��H�x��h1=50mm��
����5.2 �����S�F����F��d2
������h1 =50 mm(�� �� �Y ��)��h2 =10 mm��d1=4mm���ֲ�׃��d2 ��4mm ׃����9mm��Ӌ��Y��Ҋ�D9�����Կ������S��d2 �IJ���������������������pС��څ�ݣ����˴������s�ڲ����pС�����ڳ��������6mm≤d2≤ 8mm�r׃�������˴������pС��һ�����ң����Ԍ��H����d2=8mm��
����5.3 �����S�F����F�ĸ߶�h2
������h1=50mm��d2=8mm(�����Y��)��d1=4mm���ֲ�׃��h2 ��10mm ׃����17mm�����wӋ��Y��Ҋ�D10�����Կ������S��h2 �IJ�������������@���������˴����������½���������څ�ݡ��˴�������10N�ԃȾ����Խ��ܣ����˱M������߳��������С���� �H �x ��h2 =15mm��
����5.4 �AͲ�ں�d1
������h1=50mm��d2=8mm��h2=15mm(�����Y��)��d1 ��3mm ׃����5mm�����wӋ��Y��Ҋ�D11�����Կ������S��d2 ����������������pС���˴������ȜpС�������mȻ���ߵĘOֵ����λ��ͬһ�c�������˴������ژOֵ����׃ �� �� �� С���� �� �x �� �� �A Ͳ �� �� d1 =4.5mm���C�����ό�4�������ķ���Ӌ�㣬�_���˸��ߴ�飺h1=50mm��d1=4.5mm��h2=15mm��d2=8mm������Y���������1916.4N���˴�����11.5N�������x�õIJ����M�мӹ��b����w����Ҋ�D12��
����6 �����C
����6.1 ��������P�������
����������C��������P���H�Ĵ���Ч�����OӋ�ˈD13��ʾ�Ĝy��ƽ�_��ͨ�^�z����ĸ�������Ԍ���݆���D���D���鹤����ֱ���\�ӣ��@��һ�����������Ŵ����ã���һ��������^�龫�_�ؿ��ƹ������浽��������P����ľ��x�����g�����c�� �� �� �B �� S ���������������̿��_4900N�������Ќ��T�ķQ�ؔ��@��������ֱ�ӌ�������̖�D���锵����̖�������@ʾ��
��������ԓ�b�Ì���������P�M���˳��˴Ō����w�Y���ͷ������¡�
����6.1.1 ���˴�����
����ͨ�^��Μy��ȡƽ��ֵ�ķ�ʽ���y����������P��������СҊ��1����������֪����������P�ij��˴������c����ֵ�Ǻϵ��^�ã�������������`���13.9%;�˴����������`���11.7%��ԓ�`��ā�Դ��Ҫ�ǃɷN���F�ijC�B����ʣ�źͼ��F��B-H �����ȷ��慢���c���Hֵ����һ����ࡣ�� �Y �� �� �������������������Ӌ���1500N;�˴������mȻ����0���ǽ^��ֵ�^С���������Ï��Ɂ��˷����M����������ʹ�õ��OӋ����
����6.1.2 �������÷���
��������������P������ƽ��ľ��x���x���g϶���ó�������c�g϶֮�g���Pϵ����һ���̶��Ϸ�ӳ�����������÷��������H�y���c����Y������Ҋ�D14�����Կ������S���g϶δ ������������@���pС����δ=3mm�r�����ѽ��pС��100N ���¡�������������֧�αۏ��_�A�Σ���Ҫ��늙C����F������������P���������÷����ȣ����܌��ܱڮa��������������
����6.2 ���������������
������������ˮƽ����������һ����Ҫ�OӋָ�ˣ�ֱ���Pϵ���ھ��µ������������\ݔ��������늙C���ʝM������r���������Ĵ�С�c���������Ƴɱ����Pϵ�����������ā�Դ������������P�����������Ԡ������������C��������P�ܷ������������е��P�I���D15��ʾ�nj����õ�ˮƽ�������������а�������Ŷ̹���֧�αۺ�늙C�Ӳ��֡�����Ŷ̹���Ҫؓ؟���֧�α۵��_�τ������Ȳ�������������P�ṩ���ܱڵ�������;늙C�Ӳ��֎���֧�α�����݆�D�ӡ�3���������ϣ���ͬ������������܃ȵ�ǰ�M������
������� �� �� Ҋ �D 16���� �� �� �� ��139.7 mm(5.5in)�܃����У�β���z�b��|ͨ�^��݆�B�ӵ��g�P̎����������ǰ�M�^���У��g�P�������ӄx܇���ȣ�ֱ�����������F�F��ӛ䛴˕r������Ӌʾ���������������2�������Y��Ҋ��2��ͨ�^��Ό��y��ȡƽ��ֵ����Եõ���������С��3778.5N��ԓ��ֵ�ѽ��_�����A��3000N���OӋ�����@�f����������P�܉ܱڮa������������������ԑ�����ˮƽ���������С�
����7 �YՓ
����(1)�����������������P������ˮƽ���������У���ͨ�^����f�����Ԯa��3000N ���ϵĠ�������
����(2)�����������ߴ��ʹ�íh���OӋ����������P������������Ԫ�������M���˷���Ӌ��̓��������y�������1682N���˴�����10.3N���c����Y���^��һ�¡�ͨ�^��ӳ����������P�������÷����^С����λ��e�����^������c��
����(3)��ֱ��һ���r���S���X�⒴��F�߶Ȼ��S�F����F�߶ȵ����ӣ������������������;�S���AͲ�ں���S�F����F��ȵ����ӣ�������������������½����˴������Ĵ�С�c�X�⒴��F���S�F����F�Ĵ����������P�����߮a���Ĵ����^��ӽ��t�˴������^С�����߮a���Ĵ����^�����t�˴������^���]����������������P�Y�����������^���в��õ��Ǻ��α��^�����ь��Y������һ����ȫ����������Բ��õ��T������Ⱥ�㷨�ȬF��������������������P���˴������M���Mһ����������������������е�ʹ��Ч�����a������Ġ�������
���������īI��
����[1] HEDDLESTON D C.Horizontal-well-productionLoggingDeploymentandMeasurementTechniquesforUSLandShaleHydrocarbonPlays[J].SocietyofPetroleumEngineers��2009��SPE-120591-MS.
����[2] GE Oil&Gas.Loggingwhiletractoring[EB/OL].(2015-2-4)[2017-4-25].https��//www.geoilandgas.com/oilfield/wireline-technology/logging-while-tractoring.
����[3] ꐾ����������������ۣ���.����ŊA�ߵ����Ի��OӋ������[J].�b��S���g��2015(2)��36-40.CHENJing��ZHUXigang��WUXianqin��etal.TheFlexible Design and Application of PermanentMagnetElectricFixture[J].EquipmentTechnology��2015(2)��36-40.
����ˮƽ������������������P���OӋ�c�������PՓ���ڿ���߀�����˽⣺�����Ї����̙Cе�W�����Cе���̎��QՓ����
�����}��ˮƽ������������������P���OӋ�c����
�D�dՈע�����ԣ�http://m.optiwork.cn/fblw/ligong/jixie/40239.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:105
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИIՓ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:120
�u�Q�lՓ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D�d��Դ�ڿ���...�Pע:51
����Փ�ķ���
�����OӋՓ�� ����Ҏ��Փ�� �V�IՓ�� �C�һ�w��Փ�� ���bՓ�� ��ͨ�\ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅӻ�Փ�� ܇�vՓ�� ұ��Փ�� ���I�OӋՓ�� �CеՓ��

�ڿ��ٿƆ���
- �zӰˇ�g�I��AHCI�ڿ����]��Photog
- Nature���¶��W���ӿ�Nature Commu
- ��С�W�̎�ֵ���˽⣬�@Щ�����W��
- 2025�ꌑ����WՓ�Ŀ����õ�19���x
- �y�L�I��Ƽ������ڿ��x�� �p������
- ���r�_Փ�ęz���C������Ҫ
- �Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ���
- ���H������Ҫ�˽�Ć��}���
- ���������ܷ��u�Q��
- ��ŌW����Щ��Ͷ���SCI�ڿ���ֵ��
- ͨ�Ź����ИIՓ���x�}
- SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ���
- �u�Q�lՓ�ĺ�߀�dz�����
- ��ӡ���Y����Ҫ�D�d��Դ�ڿ���20
- Ӣ���ڿ����峣Ҋ��Փ�Ġ�B�����